
O movimento retilíneo é um tipo de movimento no qual o corpo se desloca em linha reta, sem alterar sua direção. Ele é caracterizado pela velocidade constante ao longo do percurso, podendo ser uniforme (quando a velocidade é constante) ou uniformemente variado (quando a velocidade varia de forma constante ao longo do tempo).
Existem dois tipos de movimento retilíneo: o progressivo, quando o corpo se desloca no sentido positivo do eixo, e o retrógrado, quando o corpo se desloca no sentido negativo do eixo.
Alguns exemplos de movimento retilíneo são o deslocamento de um veículo em uma estrada reta, o movimento de um elevador subindo ou descendo verticalmente, e o lançamento de um projétil em linha reta. Esses exemplos ilustram a aplicação do movimento retilíneo em diferentes situações do cotidiano.
Tipos de movimento retilíneo: conheça as diferentes formas de deslocamento em linha reta.
O movimento retilíneo é caracterizado pelo deslocamento de um corpo em linha reta, sem alteração na sua direção. Existem diferentes tipos de movimento retilíneo que podem ser estudados, cada um com suas particularidades e características específicas.
Um dos tipos de movimento retilíneo mais comuns é o movimento uniforme, no qual o corpo se desloca em linha reta com velocidade constante. Nesse tipo de movimento, a distância percorrida pelo corpo é proporcional ao tempo decorrido, sendo representada pela equação d = v * t, onde d é a distância percorrida, v é a velocidade e t é o tempo.
Outro tipo de movimento retilíneo é o movimento uniformemente variado, no qual a velocidade do corpo varia de forma constante ao longo do tempo. Nesse caso, a aceleração do corpo é constante e a distância percorrida pode ser calculada pela equação d = v0 * t + (a * t^2) / 2, onde v0 é a velocidade inicial, a é a aceleração e t é o tempo.
Além desses tipos de movimento, também podemos citar o movimento harmônico simples, no qual o corpo oscila em torno de uma posição de equilíbrio ao longo de uma linha reta. Esse tipo de movimento é caracterizado por uma trajetória sinusoidal e pode ser descrito matematicamente por equações trigonométricas.
Em resumo, o movimento retilíneo apresenta diferentes formas de deslocamento em linha reta, cada uma com suas particularidades e aplicações específicas. Compreender os diferentes tipos de movimento retilíneo é essencial para o estudo da cinemática e para a análise do comportamento de corpos em movimento.
Principais características do movimento retilíneo: uma abordagem sucinta sobre sua dinâmica e propriedades.
O movimento retilíneo é caracterizado pelo deslocamento de um objeto ao longo de uma linha reta, sem alteração de direção. Neste tipo de movimento, a velocidade e a aceleração podem variar, mas a direção permanece constante.
Uma das principais propriedades do movimento retilíneo é a sua simplicidade, o que facilita a análise e compreensão de fenômenos físicos. Além disso, é possível descrever matematicamente o movimento retilíneo através de equações que relacionam a posição, velocidade e aceleração do objeto em função do tempo.
Existem dois tipos de movimento retilíneo: uniforme e uniformemente variado. No movimento retilíneo uniforme, a velocidade do objeto permanece constante ao longo do tempo, enquanto no movimento retilíneo uniformemente variado, a aceleração é constante e a velocidade varia de forma uniforme.
Um exemplo comum de movimento retilíneo é o deslocamento de um carro em uma estrada reta. Se o carro mantiver uma velocidade constante, estará em movimento retilíneo uniforme. Já se o carro acelerar ou frear de forma constante, estará em movimento retilíneo uniformemente variado.
Exemplo de movimento retilíneo: definição e ilustração prática do conceito de trajetória linear.
O movimento retilíneo é um tipo de movimento em que um objeto se desloca ao longo de uma linha reta, sem mudar de direção. Este tipo de movimento é caracterizado pela sua simplicidade, pois a trajetória percorrida pelo objeto é uma linha reta.
Um exemplo prático de movimento retilíneo é o deslocamento de um carro em uma estrada sem curvas. Neste caso, o carro se move em linha reta, mantendo a mesma direção ao longo do percurso. Este é um exemplo claro de trajetória linear, pois o carro percorre uma linha reta de um ponto inicial a um ponto final.
No entanto, é importante ressaltar que nem todos os movimentos retilíneos são necessariamente uniformes, ou seja, com velocidade constante. Um objeto pode se deslocar em linha reta com aceleração variável, o que resulta em variações na velocidade ao longo do percurso.
Em resumo, o movimento retilíneo é caracterizado pelo deslocamento ao longo de uma linha reta, sem mudanças de direção. Um exemplo prático deste tipo de movimento é o deslocamento de um carro em uma estrada sem curvas, onde a trajetória percorrida é linear.
O que caracteriza o movimento retilíneo?
O movimento retilíneo é caracterizado pela trajetória em linha reta que um objeto percorre ao longo do tempo. Nesse tipo de movimento, a direção e o sentido são constantes, sem desvios ou curvas.
Existem dois tipos de movimento retilíneo: o movimento retilíneo uniforme (MRU), no qual o objeto se desloca com velocidade constante, e o movimento retilíneo uniformemente variado (MRUV), onde a velocidade do objeto varia de forma constante ao longo do tempo.
Alguns exemplos de movimento retilíneo são o lançamento de um projétil, o deslocamento de um elevador em um edifício e o movimento de um carro em uma estrada reta.
Em resumo, o movimento retilíneo é caracterizado pela trajetória em linha reta, sem desvios, com direção e sentido constantes ao longo do tempo.
Movimento retilíneo: características, tipos e exemplos
O movimento retilíneo é aquele em que o móvel se move ao longo de uma linha reta e, portanto, passa em uma dimensão; portanto, também recebe o nome de movimento unidimensional .Essa linha reta é o caminho ou o caminho seguido pelo objeto que se move. Os carros que se deslocam pela avenida na Figura 1 seguem esse tipo de movimento.
É o modelo mais simples de movimento que você pode imaginar. Os movimentos diários de pessoas, animais e coisas geralmente combinam transferências em linha reta com movimentos ao longo das curvas, mas muitas vezes são observados que são exclusivamente retilíneos.
Aqui estão alguns bons exemplos:
– Ao percorrer uma trilha retilínea de 200 metros.
– Dirigir um carro em uma estrada reta.
– Soltar um objeto livremente de uma certa altura.
– Quando uma bola é lançada verticalmente para cima.
No entanto, o objetivo de descrever um movimento é alcançado especificando características como:
– Posição
– Deslocamento
– Velocidade
– Aceleração
– Tempo
Para um observador detectar o movimento de um objeto, ele deve ter um ponto de referência (a origem O) e ter estabelecido uma direção específica na qual se mover, que pode ser o eixo x , o eixo y ou qualquer outro.
Quanto ao objeto que se move, ele pode ter formas infinitas. Não há limitações a esse respeito, no entanto, em tudo o que se segue, será assumido que o celular é uma partícula; um objeto tão pequeno que suas dimensões não são relevantes.
Sabe-se que esse não é o caso de objetos macroscópicos; No entanto, é um modelo com bons resultados na descrição do movimento global de um objeto. Dessa maneira, uma partícula pode ser um carro, um planeta, uma pessoa ou qualquer outro objeto que se mova.
Começaremos nosso estudo da cinemática retilínea com uma abordagem geral do movimento e, em seguida, estudaremos casos particulares como os já mencionados.
Características gerais do movimento retilíneo
A descrição a seguir é geral e aplicável a qualquer tipo de movimento unidimensional. A primeira coisa é escolher um sistema de referência. A linha ao longo da qual o movimento ocorre será o eixo x .Os parâmetros do movimento:
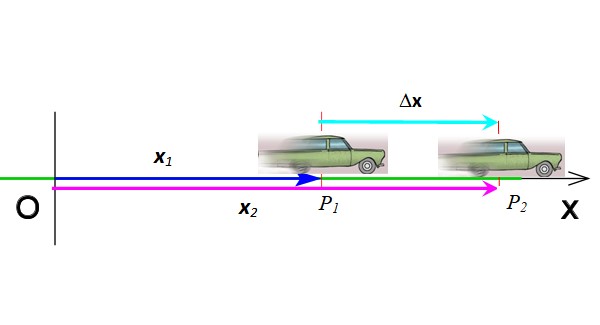
Posição

É o vetor que vai da origem ao ponto em que o objeto está em um dado momento. Na figura 2, o vetor x 1 indica a posição do móvel quando está na coordenada P 1 e no tempo t 1 . As unidades do vetor de posição no sistema internacional são metros .
Deslocamento
O deslocamento é o vetor que indica a mudança de posição. Na Figura 3, o carro tenha passado a posição P 1 para a posição P 2 , por conseguinte, o seu deslocamento é Δ x = x 2 – x 1 . O deslocamento é a subtração de dois vetores, é simbolizado pela letra grega Δ (“delta”) e, por sua vez, é um vetor. Suas unidades no Sistema Internacional são metros .
Os vetores são indicados em negrito no texto impresso. Mas estando na mesma dimensão, se desejar, você pode ficar sem a notação vetorial.
Distância percorrida
A distância d percorrida pelo objeto em movimento é o valor absoluto do vetor de deslocamento:
d = ΙΔ x Ι = Δ x
Sendo um valor absoluto, a distância percorrida é sempre maior ou igual a 0 e suas unidades são iguais às de posição e deslocamento. A notação de valor absoluto pode ser feita com as barras do módulo ou simplesmente removendo a letra em negrito no texto impresso.
Velocidade média
Com que rapidez a posição muda? Existem celulares lentos e rápidos. A chave sempre foi a velocidade. Para analisar esse fator, a posição x é analisada em função do tempo t .
A velocidade média v m (veja a figura 4) é a inclinação da linha secante (fúcsia) em relação à curva x vs te fornece informações globais sobre o deslocamento do móvel no intervalo de tempo considerado.
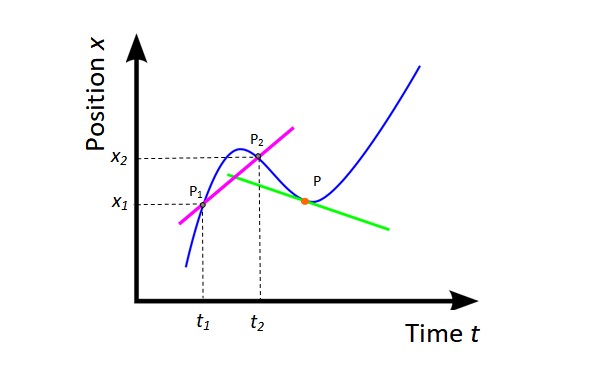
v m = ( x 2 – x 1 ) / (t 2 –t 1 ) = Δ x / Δ t
A velocidade média é um vetor cujas unidades no sistema internacional são metros / segundo ( m / s ).
Velocidade instantânea
A velocidade média é calculada com um intervalo de tempo mensurável, mas não informa o que acontece dentro desse intervalo. Para conhecer a velocidade a qualquer momento, é necessário diminuir o intervalo de tempo, matematicamente, é equivalente a:
Δt → 0
A equação acima é dada para a velocidade média. Dessa forma, você obtém velocidade instantânea ou apenas velocidade:
Geometricamente, a derivada da posição em relação ao tempo é a inclinação da linha tangente à curva x vs t em um determinado ponto. Na figura 4, o ponto é laranja e a linha tangente é verde. A velocidade instantânea nesse ponto é a inclinação dessa linha.
Rápido
A velocidade é definida como o valor absoluto ou módulo de velocidade e é sempre positiva (sinais, estradas e rodovias são sempre positivas, nunca negativas). Os termos “velocidade” e “velocidade” podem ser usados diariamente de forma intercambiável, mas na física a distinção entre vetor e escalar é necessária.
v = Ι v Ι = v
Aceleração Média e Aceleração Instantânea
A velocidade pode mudar no curso do movimento e a realidade é que se espera que isso aconteça. Existe uma magnitude que quantifica essa mudança: aceleração. Se notarmos que velocidade é a mudança de posição em relação ao tempo, aceleração é a mudança de velocidade em relação ao tempo.

O tratamento dado ao gráfico de x vs t das duas seções anteriores pode ser estendido ao gráfico correspondente de v vs t . Consequentemente, uma aceleração média e uma aceleração instantânea são definidas como:
a m = ( v 2 – v 1 ) / (t 2 –t 1 ) = Δ v / Δ t (Inclinação da linha roxa)

No movimento unidimensional, os vetores por convenção têm sinais positivos ou negativos à medida que avançam de um jeito ou de outro. Quando a aceleração tem a mesma direção que a velocidade, aumenta sua magnitude, mas quando tem a direção oposta e a velocidade diminui sua magnitude. Diz-se então que o movimento é retardado.
Tipos
A classificação dos movimentos retilíneos é geralmente feita de acordo com:
– Se a aceleração é constante ou não.
– O movimento ocorre ao longo de uma linha horizontal ou vertical.
Movimento com aceleração constante
Quando a aceleração é constante, a aceleração média a m é igual à aceleração instantânea a e existem duas opções:
– Que a aceleração vale 0; nesse caso, a velocidade é constante e há um movimento retilíneo uniforme ou MRU.
– Aceleração constante diferente de 0, na qual a velocidade aumenta ou diminui linearmente com o tempo (movimento retilíneo uniformemente variado ou MRUV):
Onde v f e t f são a velocidade e o tempo finais, respectivamente, e v o e t o são a velocidade e o tempo iniciais. Se t ou = 0 , limpando a velocidade final é tem a equação familiar para a velocidade final:
v f = v o + em
As seguintes equações também são válidas para este movimento:
– Posição em função do tempo: x = x ou + v o. t + ½ a 2
– Velocidade dependendo da posição: v f 2 = v ou 2 + 2a.Δ x (Com Δ x = x – x o )
Movimentos horizontais e verticais
Movimentos horizontais são aqueles que correm ao longo do eixo horizontal ou eixo x, enquanto movimentos verticais estão ao longo do eixo y. Os movimentos verticais sob a ação da gravidade são os mais frequentes e interessantes.
Nas equações anteriores, a = g = 9,8 m / s 2 é tomado verticalmente para baixo, direção que quase sempre é escolhida com um sinal negativo.
Dessa forma, v f = v ou + at é transformado em v f = v o – gt e se a velocidade inicial for 0 porque o objeto foi solto livremente, será ainda mais simplificado para v f = – gt . Desde que a resistência do ar não seja levada em consideração, é claro.
Exemplos resolvidos
Exemplo 1
No ponto A, uma pequena embalagem é liberada para que se mova ao longo do transportador com as rodas deslizantes ABCD mostradas na figura. Enquanto desce ao longo das seções inclinadas AB e CD, a embalagem tem uma aceleração constante de 4,8 m / s 2 , enquanto na seção horizontal BC mantém velocidade constante.

Sabendo que a velocidade com que a embalagem chega a D é de 7,2 m / s, determine:
a) A distância entre C e D.
b) O tempo necessário para o pacote chegar ao fim.
Solução
O movimento da embalagem é realizado nas três seções retilíneas mostradas e para calcular a velocidade solicitada é necessária nos pontos B, C e D. Vamos analisar cada seção separadamente:
Seção AB
Como o tempo não está disponível nesta seção, v f 2 = v ou 2 + 2a.Δ x com vo = 0 serão usados:
v f 2 = 2a.Δ x → v f 2 = 2. 4,8 m / s 2 . 3 m = 28,8 m 2 / s 2 → v f = 5,37 m / s = v B
O tempo que leva para o pacote viajar na seção AB é:
t AB = (v f – v o ) / a = 5,37 m / s / 4,8 m / s 2 = 1,19 s
Seção BC
A velocidade na seção BC é constante, portanto v B = v C = 5,37 m / s . O tempo que leva para o pacote viajar nesta seção é:
t BC = distância BC / v B = 3 m / 5,37 m / s = 0,56 s
Estiramento de CD
A velocidade inicial desta seção é v C = 5,37 m / s , a velocidade final é v D = 7,2 m / s, usando v D 2 = v C 2 + 2. a. d o valor de d é limpo :
d = ( v D 2 – v C 2 ) /2.a = ( 7.2 2 – 5,37 2 ) / 2 x 4,8 m = 2,4 m
O tempo é calculado como:
t CD = (v D – v C ) / a = ( 7,2 – 5,37) / 4,8 s = 0,38 s.
As respostas para as perguntas são:
a) d = 2,4 m
b) O tempo de viagem é t AB + t BC + t CD = 1,19 s +0,56 s +0,38 s = 2,13 s.
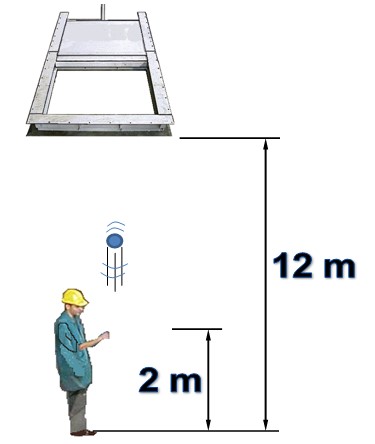
Exemplo 2
Uma pessoa está sob um portão horizontal que está inicialmente aberto e com 12 m de altura. A pessoa joga um objeto verticalmente em direção ao portão com uma velocidade de 15 m / s.
Sabe-se que o portão fecha 1,5 segundos depois que a pessoa joga o objeto a uma altura de 2 metros. A resistência do ar não será levada em consideração. Responda às seguintes perguntas, justificando:
a) O objeto passa pelo portão antes de ser fechado?
b) O objeto atingirá o portão fechado? Se sim, quando ocorre?
Resposta a)
Existem 10 metros entre a posição inicial da bola e o portão. É um lançamento vertical, no qual essa direção é tomada como positiva.
Você pode descobrir a velocidade necessária para atingir essa altura. Com esse resultado, o tempo necessário para calculá-lo é calculado e comparado com o tempo de fechamento do portão, que é de 1,5 segundos:
v f 2 = v ou 2 – 2.g. Δ y → v f = (15 2 – 2 x 9,8 x 10) 1/2 m = 5,39 m / s
t = (v f – v o ) / g = (5.39 – 15) / (-9.8) s = 0.98 s
Como esse tempo é inferior a 1,5 segundos, conclui-se que o objeto pode passar pelo portão pelo menos uma vez.
Resposta b)
Já sabemos que o objeto consegue passar pelo portão enquanto sobe, vamos ver se ele lhe dá uma chance de passar novamente quando você desce. A velocidade, ao atingir a altura do portão, tem a mesma magnitude de quando sobe, mas na direção oposta. Portanto, ele trabalha com -5,39 m / se o tempo necessário para chegar a essa situação é:
t = (v f – v o ) / g = (-5,39 – 15) / (-9,8) s = 2,08 s
Como o portão permanece aberto por apenas 1,5 s, é claro que não lhe dá tempo de passar novamente antes de fechar, pois está fechado. A resposta é: o objeto se atingir o portão fechado após 2,08 segundos após o lançamento, quando já estiver em descida.
Referências
- Figueroa, D. (2005). Série: Física para Ciência e Engenharia. Volume 1. Cinemática. Editado por Douglas Figueroa (USB) .69-116.
- Giancoli, D. Física. (2006). Princípios com aplicações. 6 ª Edição . Prentice Hall. 22-25.
- Kirkpatrick, L. 2007. Física: Um olhar sobre o mundo. 6 ta Abridged Edition. Cengage Learning 23-27.
- Resnick, R. (1999). Física Volume 1. Terceira edição em espanhol . México Empresa Editorial Continental SA de CV 21-22.
- Rex, A. (2011). Fundamentos de Física. Pearson 33 – 36
- Sears, Zemansky. 2016. Física Universitária com Física Moderna. 14 th . Ed. Volume 1. 50-53.
- Serway, R., Jewett, J. (2008). Física para Ciências e Engenharia. Volume 1. 7 ma . Edição . México Cengage Learning Publishers. 23-25.
- Serway, R., Vulle, C. (2011). Fundamentos de Física. 9 na Ed. Cengage Learning. 43-55.
- Wilson, J. (2011). Física 10. Educação em Pearson. 133-149.