
A álgebra de vetores é um ramo da matemática que estuda as propriedades e operações matemáticas envolvendo vetores. Neste contexto, vetores são entidades matemáticas que possuem magnitude, direção e sentido, e são representados por segmentos de reta orientados. Na álgebra de vetores, é possível realizar operações como soma, subtração, multiplicação por um escalar e cálculo de magnitudes, que são fundamentais para a resolução de problemas em diversas áreas da ciência e engenharia. Neste artigo, exploraremos os fundamentos da álgebra de vetores, discutindo as propriedades dos vetores, as operações básicas e o cálculo de magnitudes.
Entendendo a importância da magnitude em vetores: o que é e como calcular.
A álgebra de vetores é uma parte fundamental da matemática que estuda grandezas vetoriais, ou seja, grandezas que possuem direção e magnitude. A magnitude de um vetor é a medida do seu comprimento, representando a intensidade da grandeza que ele está associado. Compreender a importância da magnitude em vetores é essencial para realizar operações matemáticas corretamente e interpretar corretamente os resultados obtidos.
Para calcular a magnitude de um vetor, utilizamos o Teorema de Pitágoras. Se tivermos um vetor v = (a, b), onde ‘a’ representa a componente na direção x e ‘b’ a componente na direção y, então a magnitude do vetor será dada por:
|v| = √(a² + b²)
Essa fórmula nos permite encontrar o comprimento do vetor, ou seja, a sua intensidade. É importante ressaltar que a magnitude de um vetor é sempre um valor positivo, pois representa apenas a sua intensidade, independente da direção em que ele está apontando.
Em resumo, a magnitude de um vetor é um conceito fundamental em álgebra de vetores, pois representa a intensidade da grandeza que ele está associado. Para calcular a magnitude de um vetor, utilizamos o Teorema de Pitágoras, aplicando-o às componentes do vetor na direção x e y. Compreender e saber calcular a magnitude de um vetor é essencial para realizar operações matemáticas corretamente e interpretar os resultados de forma adequada.
Descubra as 3 características essenciais que definem os vetores na matemática.
A Álgebra de vetores é uma área importante da matemática que estuda as propriedades e operações envolvendo vetores. Os vetores são entidades matemáticas que possuem três características essenciais que os definem: magnitude, direção e sentido.
A magnitude de um vetor é o seu comprimento, representado por um número real positivo. Ela indica a intensidade da grandeza que o vetor representa, como por exemplo a força ou a velocidade. A magnitude de um vetor pode ser calculada utilizando o teorema de Pitágoras no caso de vetores em duas dimensões, ou a fórmula geral de magnitude em três dimensões.
A direção de um vetor é a reta ao longo da qual ele se estende. Ela é representada por um ângulo em relação a um eixo de referência, como o eixo x em um plano cartesiano. A direção de um vetor pode ser descrita utilizando coordenadas polares ou utilizando cossenos diretores para determinar os ângulos em relação aos eixos.
O sentido de um vetor é a orientação em que ele aponta ao longo da sua direção. Pode ser representado por uma seta que indica a trajetória do vetor. O sentido de um vetor é importante em problemas práticos, como navegação ou dinâmica, onde a direção e o sentido do vetor influenciam o resultado final.
Portanto, as três características essenciais que definem os vetores na matemática são a magnitude, a direção e o sentido. Compreender essas propriedades é fundamental para realizar operações com vetores e aplicá-los em diversas áreas da matemática e da física.
Conceito e aplicações da álgebra vetorial: entenda como funciona e suas aplicações práticas.
A álgebra vetorial é um ramo da matemática que estuda as operações e propriedades dos vetores. Um vetor é uma quantidade que possui magnitude e direção, sendo representado por uma seta que indica o sentido da grandeza. A álgebra vetorial é fundamental em diversas áreas da ciência, como física, engenharia e computação.
As operações básicas da álgebra vetorial incluem a adição e subtração de vetores, a multiplicação por um escalar e o cálculo de produtos escalares e vetoriais. A adição de vetores é feita pela regra do paralelogramo, onde a resultante é a diagonal do paralelogramo formado pelos dois vetores.
Uma das aplicações práticas da álgebra vetorial é na física, onde os vetores são utilizados para representar forças, velocidades e acelerações. Por exemplo, ao calcular a resultante de várias forças atuando sobre um corpo, é necessário somar os vetores força para determinar a direção e magnitude da força resultante.
Outra aplicação importante da álgebra vetorial é na computação gráfica, onde os vetores são utilizados para representar pontos no espaço tridimensional e realizar operações como rotações e translações. Algoritmos de computação gráfica utilizam a álgebra vetorial para manipular objetos virtuais em jogos e animações.
Em resumo, a álgebra vetorial é uma ferramenta poderosa para representar e manipular grandezas vetoriais em diversas áreas da ciência e tecnologia. Seu estudo é essencial para compreender fenômenos físicos, desenvolver algoritmos computacionais e resolver problemas práticos do dia a dia.
Componentes de um vetor: quais são as três?
Na álgebra de vetores, é fundamental compreender os componentes de um vetor. Um vetor é uma entidade matemática que possui magnitude e direção. Os componentes de um vetor são as partes que o compõem e nos permitem descrevê-lo de forma mais precisa. Existem três componentes principais em um vetor: magnitude, direção e sentido.
A magnitude de um vetor é o seu tamanho, ou seja, o comprimento do vetor. Ela é representada por um número real não negativo e pode ser encontrada através de cálculos matemáticos específicos. A direção de um vetor indica para onde ele está apontando, sendo representada por um ângulo em relação a um eixo de referência. Já o sentido de um vetor determina a orientação em que ele está se movendo ou apontando, podendo ser positivo ou negativo.
Para descrever completamente um vetor, é necessário especificar seus três componentes: magnitude, direção e sentido. Com essas informações, podemos realizar operações matemáticas com vetores, como soma, subtração, multiplicação e divisão. A compreensão dos componentes de um vetor é essencial para resolver problemas de física, engenharia, matemática e outras áreas que envolvem grandezas vetoriais.
Álgebra de vetores: Fundamentos, magnitudes, vetores
A álgebra vector é um ramo da matemática que estuda sistemas de equações lineares, vetores, matrizes, espaços vectorial e transformações lineares. Relaciona-se a áreas como engenharia, resolução de equações diferenciais, análise funcional, pesquisa operacional, gráficos computacionais, entre outras.
Outra das áreas adotadas pela álgebra linear é a física , pois com isso foi possível desenvolver o estudo dos fenômenos físicos, descrevendo-os através do uso de vetores. Isso tornou possível uma melhor compreensão do universo.
Fundamentos
A álgebra vetorial originou-se do estudo de quaternions (extensão de números reais) 1, i, j e k, bem como da geometria cartesiana promovida por Gibbs e Heaviside, que perceberam que vetores serviriam como um instrumento para Representam vários fenômenos físicos.
A álgebra vetorial é estudada através de três fundamentos:
Geometricamente
Os vetores são representados por linhas que têm uma orientação, e operações como adição, subtração e multiplicação por números reais são definidas por métodos geométricos.
Analiticamente
A descrição dos vetores e suas operações é feita com números, chamados componentes. Esse tipo de descrição é o resultado de uma representação geométrica porque um sistema de coordenadas é usado.
Axiomaticamente
É feita uma descrição dos vetores, independentemente do sistema de coordenadas ou de qualquer tipo de representação geométrica.
O estudo de figuras no espaço é feito através de sua representação em um sistema de referência, que pode estar em uma ou mais dimensões. Entre os principais sistemas estão:
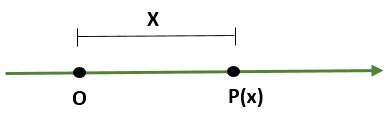
– Sistema unidimensional, que é uma linha em que um ponto (O) representa a origem e outro ponto (P) determina a escala (comprimento) e a direção disso:
– Sistema de coordenadas retangulares (bidimensional), composto de duas linhas perpendiculares denominadas eixo xe eixo y, que passam por uma origem pontual (O); dessa forma, o avião é dividido em quatro regiões chamadas quadrantes. Neste caso, um ponto (P) no plano é dado pelas distâncias entre os eixos e P.

– Sistema de coordenadas polares (bidimensional). Nesse caso, o sistema é composto de um ponto O (origem) chamado polo e um semi-reto com uma origem O chamada eixo polar. Nesse caso, o ponto P do plano, com referência ao polo e ao eixo polar, é dado pelo ângulo (Ɵ), formado pela distância entre a origem e o ponto P.

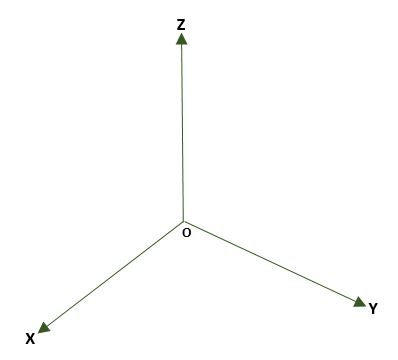
– Sistema retangular tridimensional, formado por três linhas perpendiculares (x, y, z) que têm um ponto O no espaço como origem. Três planos de coordenadas são formados: xy, xz e yz; O espaço será dividido em oito regiões chamadas octantes. A referência de um ponto P do espaço é dada pelas distâncias entre os planos e P.
Magnitudes
Uma magnitude é uma quantidade física que pode ser contada ou medida através de um valor numérico, como no caso de alguns fenômenos físicos; no entanto, muitas vezes é necessário ser capaz de descrever esses fenômenos com outros fatores que não numéricos. É por isso que as magnitudes são classificadas em dois tipos:
Magnitude escalar
São aquelas quantidades definidas e representadas numericamente; isto é, por um módulo junto com uma unidade de medida. Por exemplo:
a) Tempo: 5 segundos.
b) Massa: 10 kg.
c) Volume: 40 ml.
d) Temperatura: 40 ° C.
Magnitude vetorial
São aquelas quantidades definidas e representadas por um módulo juntamente com uma unidade, bem como por um sentido e direção. Por exemplo:
a) Velocidade: (5ȋ – 3ĵ) m / s.
b) de aceleração: 13 m / s 2 ; S 45º E.
c) Força: 280 N, 120º.
d) Peso: -40 ĵ kg-f.
As quantidades de vetores são representadas graficamente por vetores.
O que são vetores?
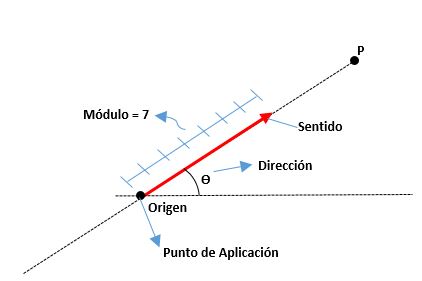
Vetores são representações gráficas de magnitude vetorial; isto é, são segmentos retos nos quais seu final é a ponta de uma flecha.
São determinados pelo comprimento do módulo ou segmento, a direção indicada pela ponta da seta e a direção de acordo com a linha à qual pertence. A origem de um vetor também é conhecida como ponto de aplicação.
Os elementos de um vetor são os seguintes:
Módulo
É a distância da origem até o final de um vetor, representada por um número real junto com uma unidade. Por exemplo:
OM = | A | = A = 6 cm
Morada
É a medida do ângulo que existe entre o eixo x (do positivo) e o vetor, bem como os pontos cardeais (norte, sul, leste e oeste).
Sense
É dado pela ponta da seta localizada no final do vetor, indicando para onde está indo.
Classificação de vetores
Geralmente, os vetores são classificados como:
Vetor fixo
É aquele cujo ponto de aplicação (origem) é fixo; isto é, ele permanece vinculado a um ponto no espaço e, portanto, não pode se mover nele.
Vetor livre
Pode se mover livremente no espaço porque sua origem se move para qualquer ponto sem alterar seu módulo, direção ou direção.
Vetor deslizante
É aquele que pode transferir sua origem ao longo de sua linha de ação sem alterar seu módulo, significado ou direção.
Propriedades do vetor
Entre as principais propriedades dos vetores estão as seguintes:
Vetores de computador
São esses vetores livres que possuem o mesmo módulo, direção (ou são paralelos) e são sentidos como um vetor deslizante ou um vetor fixo.
Vetores equivalentes
Ocorre quando dois vetores têm a mesma direção (ou são paralelos), a mesma direção e, apesar de terem módulos e pontos de aplicação diferentes, eles causam efeitos iguais.
Igualdade de vetores
Eles têm o mesmo módulo, direção e significado, mesmo quando seus pontos de partida são diferentes, o que permite que um vetor paralelo se transfira sem afetá-lo.
Vetores opostos
Eles são aqueles que têm o mesmo módulo e direção, mas seu significado é o oposto.
Vetor de unidade
É aquele em que o módulo é igual à unidade (1). Isso é obtido dividindo o vetor por seu módulo e é usado para determinar a direção e a direção de um vetor, no plano ou no espaço, usando os vetores de base ou unidade padronizados, que são:

Vetor nulo
É aquele cujo módulo é igual a 0; isto é, seu ponto de origem e fim coincidem no mesmo ponto.
Componentes de um vetor
Os componentes de um vetor são aqueles valores das projeções de vetores nos eixos do sistema de referência; dependendo da decomposição do vetor, que pode estar em eixos de duas ou três dimensões, dois ou três componentes serão obtidos, respectivamente.
Os componentes de um vetor são números reais, que podem ser positivos, negativos ou até zero (0).
Portanto, se você tiver um vetor Ā, que se origina de um sistema de coordenadas retangular no plano xy (bidimensional), a projeção no eixo x é Āx e a projeção no eixo y é Āy. Assim, o vetor será expresso como a soma de seus vetores componentes.
Exemplos
Primeiro exemplo
Existe um vetor Ā cuja parte da origem e as coordenadas de suas extremidades são dadas. Assim, o vetor Ā = (Ā x ; A y ) = (4; 5) cm.

Se o vetor Ā atua na origem de um sistema de coordenadas triangulares tridimensionais (no espaço) x, y, z, para outro ponto (P), as projeções em seus eixos serão Āx, Āy e Āz; assim, o vetor será expresso como a soma dos seus três vetores componentes.
Segundo exemplo
Existe um vetor Ā cuja parte da origem e as coordenadas de suas extremidades são dadas. Assim, o vetor Ā = (A x ; A y; A z ) = (4; 6; -3) cm.

Vetores que têm suas coordenadas retangulares podem ser expressos com base em seus vetores de base. Para isso, apenas cada coordenada deve ser multiplicada pelo seu respectivo vetor unitário, para que, para o plano e o espaço, sejam os seguintes:
Para o plano: Ā = A x i + A e j.
Para espaço: Ā = A x i + A e j + A z k.
Operações de vetor
Existem muitas magnitudes que possuem módulo, direção e direção, como aceleração, velocidade, deslocamento, força, entre outras.
Eles são aplicados em várias áreas da ciência e, em alguns casos, é necessário executar operações como adição, subtração, multiplicação e divisão de vetores e escalares.
Adição e subtração de vetores
A adição e subtração de vetores é considerada uma única operação algébrica porque a subtração pode ser escrita como uma soma; por exemplo, a subtração dos vetores Ā e Ē pode ser expressa como:
Ā – Ē = Ā + (-Ē)
Existem diferentes métodos para realizar a adição e subtração de vetores: eles podem ser gráficos ou analíticos.
Métodos gráficos
Usado quando um vetor possui módulo, sentido e direção. Para isso, são desenhadas linhas que formam uma figura que posteriormente ajuda a determinar o resultado. Entre os mais conhecidos estão os seguintes:
Método do paralelogramo
Para fazer a adição ou subtração de dois vetores, um ponto comum é escolhido no eixo de coordenadas – que representará o ponto de origem dos vetores -, mantendo seu módulo, direção e direção.
Em seguida, linhas paralelas aos vetores são desenhadas para formar um paralelogramo. O vetor resultante é a diagonal que vai do ponto de origem de ambos os vetores ao vértice do paralelogramo:

Método do triângulo
Nesse método, os vetores são colocados próximos um do outro, mantendo seus módulos, sentidos e direções. O vetor resultante será a união da origem do primeiro vetor com o final do segundo vetor:

Métodos analíticos
Dois ou mais vetores podem ser adicionados ou subtraídos por um método geométrico ou vetorial:
Método geométrico
Quando dois vetores formam um triângulo ou paralelogramo, o módulo e a direção do vetor resultante podem ser determinados usando as leis do seno e do cosseno. Assim, o módulo do vetor resultante, aplicando a lei do cosseno e pelo método do triângulo, é dado por:

Nesta fórmula β é o ângulo oposto ao lado R, e é igual a 180º – Ɵ.
Por outro lado, pelo método do paralelogramo, o módulo do vetor resultante é:

A direção do vetor resultante é dada pelo ângulo (α), que forma o resultante com um dos vetores.
Pela lei do seno, a adição ou subtração de vetores também pode ser feita pelo método do triângulo ou paralelogramo, sabendo que em cada triângulo os lados são proporcionais aos peitos dos ângulos definidos:

Método vetorial
Isso pode ser feito de duas maneiras: dependendo de suas coordenadas retangulares ou de seus vetores de base.
Isso pode ser feito movendo os vetores a serem adicionados ou subtraídos à origem das coordenadas e, em seguida, todas as projeções em cada um dos eixos do plano (x, y) ou do espaço (x, e, z); Finalmente, seus componentes são adicionados algebricamente. Então, para o avião é:

O módulo do vetor resultante é:

Enquanto para o espaço é:

O módulo do vetor resultante é:

Quando somas de vetor são feitas, várias propriedades são aplicadas, que são:
– Propriedade associativa: a resultante não muda ao adicionar dois vetores primeiro e depois ao adicionar um terceiro vetor.
– Propriedade comutativa: a ordem dos vetores não altera a resultante.
– Propriedade distributiva do vetor: se um escalar é multiplicado pela soma de dois vetores, é igual à multiplicação do escalar por cada vetor.
– Propriedade distributiva escalar: se um vetor é multiplicado pela soma de dois escalares, é igual à multiplicação do vetor por cada escalar.
Multiplicação vetorial
A multiplicação ou produto de vetores pode ser executada como adição ou subtração, mas dessa maneira perde o significado físico e quase nunca é encontrada nas aplicações. Portanto, geralmente os tipos de produtos mais utilizados são o escalar e o vetor.
Produto escalar
Também é conhecido como um produto escalar de dois vetores. Quando os módulos de dois vetores são multiplicados pelo cosseno do menor ângulo formado entre eles, um escalar é obtido. Para expressar um produto escalar entre dois vetores, um ponto é colocado entre eles, e isso pode ser definido como:

O valor do ângulo que existe entre os dois vetores dependerá se estes são paralelos ou perpendiculares; Então, você precisa:
– Se os vetores são paralelos e têm o mesmo significado, cosseno 0º = 1.
– Se os vetores são paralelos e têm direções opostas, cosseno 180º = -1.
– Se os vetores são perpendiculares, cosseno 90º = 0.
Esse ângulo também pode ser calculado sabendo que:

O produto escalar possui as seguintes propriedades:
– Propriedade comutativa: a ordem dos vetores não altera o escalar.
-Propriedade distribuidora: se um escalar é multiplicado pela soma de dois vetores, é igual à multiplicação do escalar para cada vetor.
Produto vetorial
A multiplicação de vetores, ou produto cruzado de dois vetores A e B, resultará em um novo vetor C e é expressa usando um cruzamento entre os vetores:

O novo vetor terá suas próprias características. Assim:
– A direção: esse novo vetor será perpendicular ao plano, que é determinado pelos vetores originais.
– A direção: é determinada com a regra da mão direita, onde o vetor A é girado em direção a B, indicando a direção da rotação com os dedos e, com o polegar, a direção do vetor é marcada.
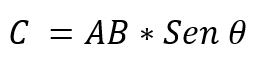
– O módulo: é determinado pela multiplicação dos módulos dos vetores AxB, pelo menor ângulo existente entre esses vetores. Está expresso:
O valor do ângulo que existe entre os dois vetores dependerá se estes são paralelos ou perpendiculares. Em seguida, é possível afirmar o seguinte:
– Se os vetores são paralelos e têm o mesmo significado, seno 0º = 0.
– Se os vetores são paralelos e têm direções opostas, seno 180º = 0.
– Se os vetores são perpendiculares, seno 90º = 1.
Quando um produto vetorial é expresso com base em seus vetores base, ele deve ser:

O produto escalar possui as seguintes propriedades:
– Não é comutativo: a ordem dos vetores altera o escalar.
– Propriedade distributiva: se um escalar é multiplicado pela soma de dois vetores, é igual à multiplicação do escalar por cada vetor.
Referências
- Altman Naomi, MK (2015). “Regressão Linear Simples.” Nature Methods.
- Angel, AR (2007). Álgebra Elementar Educação em Pearson,.
- Arthur Goodman, LH (1996). Álgebra e trigonometria com geometria analítica. Pearson Education.
- Gusiatnikov, P. e Reznichenko, S. (sf). Álgebra a Vectorial em Exemplos. Moscou: Mir.
- Lay, DC (2007). Álgebra linear e suas aplicações. Pearson Education.
- Llinares, JF (2009). Álgebra linear: espaço vetorial. Espaço vetorial euclidiano. Universidade de Alicante
- Mora, JF (2014). Álgebra Linear. Pátria